「挑战无止境,青春有所为」2021年全国大学生电子设计竞赛福建赛区一等奖获奖队伍及获奖作品介绍
在刚刚结束的2021年全国大学生电子设计竞赛上,福州理工学院计算与信息科学学院共斩获福建赛区四项一等奖、五项二等奖、七项三等奖,取得我校“全国大学生电子设计竞赛”大赛参赛以来的最好成绩。接下来,就让我们一起去认识一下四组省一等奖获奖队伍及他们的作品吧!
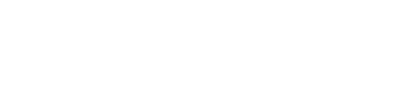
信号失真度测量装置

(指导老师:戴坤成 参赛学生:苏婷 叶田梁 雷伟)
本作品设计以TI的MSP430F55229为主控制芯片,硬件整体分为四大部分,即采集模块、传输模块、显示模块、主控模块。在信号采样方面,通过MSP430F5529内部12位ADC模块采集电压,以实现输入信号波形采样;在软件计算方面,通过单片机编程,采用FFT算法实现信号失真度计算;在显示方面,由OLED显示相关信号失真度与标识,且通过高性能主从一体蓝牙串口模块将THD值在手机上显示。在设计上,作品的工作顺序是先进行系统初始化,然后在按下按钮1时,开始将ADC采集到的数据存进对应数组,后将对应数组进行FFT运算,得出THD值,再将THD值显示在OLED上,在通过蓝牙模块的串口传输,最后在手机上显示THD值。这种设计方法能够及时发送数据与接收数据,避免了复杂的定时程序设计,总体程序设计简洁,响应时间快,控制精度高。
植保无人机
(指导老师:董恒 参赛学生:施友畅 陈诗杰 刘俊)

本四旋翼无人机主要是由无名创新的TIVA飞控为控制中心,该飞控使用的是TM4C123GH6PM为核心设计的,飞控还自带数字加速度计、陀螺仪传感器 MPU6050、利用激光雷达TF-minis气压计传感器 SPL06-001数据融合实现定高, 飞控板载 IMU 自带恒温控制系统,该系统能有效减小传感器的飘移,提高姿态解算与惯导状态的估计精度。通过OPENMV来进行颜色识别采集环境信息,通过光流模块思想飞机的悬停,通过外接的激光雷达来实现无人机高度的控制。经过了四天三夜的时间实现了既定的功能,包括一键起飞并根据设定路线飞行,通过外接的OPENMV来对地面颜色进行识别,再通过程序将信号传输回飞控在控制激光笔打点等。
植保无人机
(指导老师:刘顺财 参赛学生:金潜 龚宜炯 吴炳坤)

本植保飞行器以TIVA飞控为控制核心,内置六轴姿态传感器MPU6050、气压计SPL06-001,外接磁力罗盘HMC5883,TF-Mini-Plus激光雷达,OpenMV4。MPU6050与磁力罗盘HMC5883通过IIC通信连接飞控,对飞行姿态进行解算,传输九轴欧拉角,四元数,旋转矩阵数据。定高采用TF-Mini-Plus激光雷达和气压计SPL06-001实现融合定高。图像处理采用OpenMV4采集环境信息,实现对起飞点、播撒开始点A点、边缘,降落点坐标读取、传输至飞控、对飞行过程进行控制等。OpenMV4外接继电器,当探测到正下方色块为绿色时输出低电平驱动继电器开关,实现模拟播撒。经过四天三夜奋战,28个播撒区能实现18个区域播撒成功,最终在降落点能定点稳定降落。
植保无人机
(指导老师:吕念芝 参赛学生:林斌 郭少奇 陈祉轩)

本作品设计中使用了一块Tiva Pro飞控,是以TIVA C系列微处理器TM4C123GH6PM为主控制芯片,利用激光雷达TFmini Plus和气压计SPL06-001数据融合实现定高、利用光流LC307实现定点,图像处理采用OpenMV采集地面环境信息、利用MP1584NE稳压模块分别给飞控和电机供电。用飞控上的按键2作为起飞控制键,利用无刷电机实现飞行器的启动和稳定运行,飞行器的LED状态灯来显示任务执行状态。飞行器在“十”字起降点垂直起飞,升空至150±10cm 巡航高度,作业完成后稳定准确降落在起降点,飞行器几何中心点与起降点中心距离的偏差不大于±10cm的效果。通过视觉模块openMV进行播撒区域识别,绿色色块视为作业区,在作业区内自动播撒“农药”,触发激光笔投射激光至指定区域。这种数据交互的程序设计方法能够及时响应色块信息的变化,避免了复杂的定时采样程序设计,总体程序设计简洁,响应时间快。
挑战无止境 青春有所为。每一次比赛都是一次成长,心之所向,一往无前。从3月份的竞赛动员到11月份的正式比赛,从校级的电子设计比赛到国家级的电子设计竞赛,他们用奋斗的脚步丈量崭新的征程,为计信学子树立了科创之路上的青春榜样!愿计信学子都能向阳而生,不负青春,不负韶华,赓续百年荣光 追逐青春梦想!
- 上一篇:点赞计信人|计信学子在2021年全国大学生电子设计竞赛中斩获 2021/12/24
- 下一篇:中国大学生计算机设计大赛开始报名啦! 2021/12/23